

Почитать
Случайно о фото
Цифровые изображения и их свойстваДавайте поговорим о разрешении изображений. А точнее - цифровых изображений. Термин "Разрешение" так часто и не всегда к месту используют, что создалась немалая путаница. Любит наука измерять, даже больше чем изучать. И разрешению придумали свою мерку. Да вот беда, мерок придумали далеко не одну. "Разрешением" называют настолько различные параметры изображений, что измеряют его теперь в dpi, ppi, lpi, и даже в MP (мегапикселах). |
| Подробнее ... |
R/C: Случайная статья
|
Arduino - хорошая платформа для самоделкиных вроде меня. Удобная, все в ней уже есть. В чем проблема?Программная часть мне далеко не всем нравится. Особенно ужасна Arduino IDE. Каждый файл открывается в новом окне, оставляя пустое запущенное окно IDE. И прочие мелкие глупости, которые привыкших к удобству Visual Studio, Borland/Embarcadero RAD IDE расстраивают и вызывают неудовольствие. К счастью, мы можем использовать любую IDE какая понравится. Для готовых проектов, которые только скомпилировать и прошить или собственных пробных поделок вполне годится тот огрызок Wiring, который компилируется Arduino IDE. Для удобства работы я использую Visual Micro Arduino - удобство Visual Studio, быстрая компиляция, прошивка стандартными средствами. |
| Подробнее ... |
| Строим гусеничного Bluetooth-робота с камерой. Часть 2 |
 |
 |
| 19.01.2012 12:26 |
|
Продолжаем строить гусеничного робота. BluetoothМоторы уже подключены к MotorShield. Пора установить связь с ПК.Для этого берем Bluetooth модуль и подключаем его пины T и R к пинам 0(Rx) и 1 (Tx) Arduino. + и — подключаем соответственно к пинам +5 и GND. Не перепутайте полярность питания — модуль может сгореть. При подаче питания на Arduino модуль должен мигать светодиодом — он готов к подключению. Идем на ПК, ищем bluetooth устройство с именем «linvor» — это имя модуля по умолчанию. В дальнейшем его, как и скорость работы можно изменить с помощью AT команд. (В частности, я свой настроил на 115200 вместо 9600 и дал имя «BT1»). Спариваем ПК с модулем, используя код «1234». В системе должно появиться 2 COM порта — один для исходящих соединений, другой для входящих. Нас интересует именно первый. 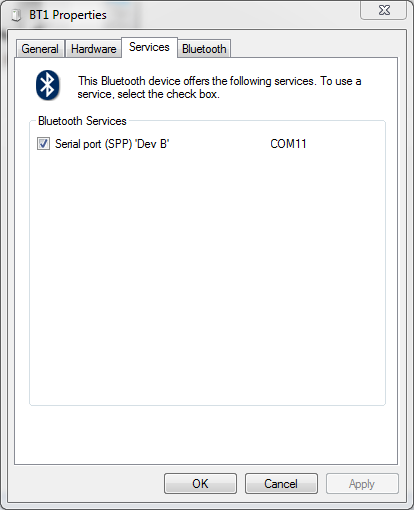 Выпишите номер COM порта, он нам пригодится потом для подключения. Если портов в свойствах устройства два и вы не можете определить который исходящий, запишите оба, определите позже методом тыка. ВидеоподсистемаСначала я заказал вот такой комплект: Но при попытке избавиться от толстого шнурка, я спалил камеру. Если вы аккуратнее, то все, что вам нужно, это закрепить камеру на роботе винтиком и подать на нее 12В (от 9В у меня вопреки заявляениям китайцев не работает). Передающая часть готова. Для приемной части есть два пути — купить маленький телевизор на 4-7" (я себе недавно такой купил) или подключить к ПК/ноутбуку. Для второго варианта нам понадобится подключить EasyCAP к ПК, поставить драйвер и установить любую программу, которая может выводить изображение с устройства видеозахвата. Я использую DScaler. А для того, чтобы удобнее было пользоваться, ресивер и EasyCAP я встроил в коробку от комлекта ресивера с камерой. Туда же можно положить аккумулятор для питания ресивера. Для этого в задней стенке прорезал отверстия под разъем антенны, ручки подстройки ресивера и под USB разъем EasyCAP. Внутри коробки соединяем выходы ресивера со входами CVRS и Audio (если есть микрофон на камере). Предварительно сняв ручку и антенну, просовываем в отверстия ресивер и EasyCAP. Крепим к дну двусторонним или обычным скотчем оба девайса.  «1.2GHz Receiver+EasyCAP» Снаружи навинчиваем антенну и надеваем колпачок и ручку. Подключать EasyCAP к ПК или ноуту будем комплектным удлинительным шнурком.  «1.2GHz Receiver+EasyCAP» На этом этапе полезно подать питание на камеру, включить ресивер и попробовать в DScaler сначала подключиться к EasyCAP (устройство видно как USB VideoGrabber) а затем ручкой настройки на ресивере поймать сигнал с камеры. Если все собрано правильно, поздравляю — видеотракт готов, можно побаловаться с ним. Pan&TiltЕсли вы заказали поворотно-наклонную (PanTilt) площадку и сервоприводы, то нужно собрать подвес камеры. Все соединения делаются обычным суперклеем, но будьте осторожны, сервоприводы приклеиваются намертво! Поэтому стоит проверить все дважды. Камеру на площадку крепим разъемом вниз, в сторону поворотной (Pan) сервы. Перед установкой камеры, найдите среднее положение поворотного сервопривода и надев качалку в этом положении так, чтобы камера смотрела вперед, прикрутите шурупом. К поворотному сервоприводу я вырезал из белого акрила скобу, с помощью которой немного удобнее крепить к площадке всю конструкцию. можно напрямую длинным винтиком М3 или с помощью П-образной детальки конструктора, как у меня: 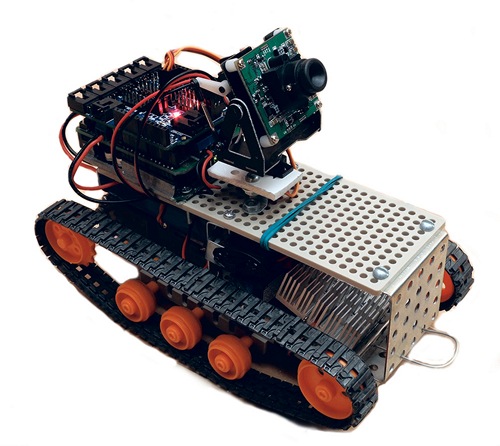 К самой скобе сервопривод крепится комплектными шурупами. В конструкторе винтики М4, поэтому мне пришлось немного рассверлить отверстия в плате. Сервоприводы подключаем так: коричневый и красный провод — +5 и Gnd соответственно, оранжевый — сигнал управления. Сигнальный провод сервы вращения подключаем к пину D10 Arduino, сигнальный провод сервы наклона камеры — к пину D9. На sensor shield есть удобные трехконтактные разъемы GND,VCC,Dx для каждого цифрового пина Arduino. Сделаны специально для такого случая — штекер сервы подключается напрямую без дополнительных проводков. Так как я спалил свою камеру, да и качество ее не особо высокое было, то я купил модуль Sony 1/3" CCD  К счастью, передатчик убитой камеры уцелел и я припаял его напрямую к камере Sony, аккуратно выпаяв его из сгоревшей дешевой камеры. Питание камеры и передатчика я объединил, припаяв на один штеккер и затянув в термоусадку. У передатчика желтый провод — видеовход, белый — аудиовход, красный и черный как обычно — + питания и земля, но питание от преобразователя, встроенного в шнурок, поэтому нужно запомнить какой провод шел к передатчику, когда отпаивать будете. У меня получилось вот так:  «Sony CCD camera & 1.2GHz Transmitter» Передатчик греется во время работы, но это особенность его конструкции, что-то там китайцы намудрили с питанием, видимо. ПитаниеМоторы и Arduino мы будем питать от одного источника, для этого переключатель Ext/Ard на MotorShield установим в положение Ard. Теперь напряжение 7-12В можно подать через стандартный разъем питания Arduino или через клеммник на MotorShield. Для питания камеры и передатчика можно использовать либо отдельный аккумулятор на 12В или вот такой бустер (недавно появился в продаже):  Аккумулятор устанавливаем на первом этаже. Спереди этажи можно скрепить металлической скобой из конструктора, чтобы второй этаж не болтался. Ура, аппаратная часть готова. Осталось написать прошивку для микроконтроллера и программу для ПК. |
