

Почитать
Случайно о фото
«Нужна ли мне зеркалка?»Обычно я отвечаю так: «раз ты задаешь мне этот вопрос, значит, точно не нужна!». |
| Подробнее ... |
R/C: Случайная статья
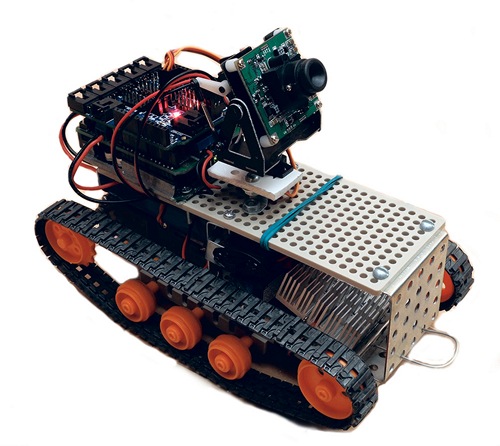
По многочисленным просьбам я решил описать процесс создания вот такого робота с камерой на гусеничном шасси и управлением по bluetooth с помощью джойстика. |
| Подробнее ... |
| Строим гусеничного Bluetooth-робота с камерой. Часть 1 |
 |
 |
| 19.01.2012 12:26 |
|
По многочисленным просьбам я решил описать процесс создания вот такого робота с камерой на гусеничном шасси и управлением по bluetooth с помощью джойстика. Вообще говоря, робота можно купить и готового, но -во-первых это не так интересно — сам процесс создания робота своими руками доставляет огромное удовольствие -во-вторых при покупке готового робота переделать его под свои интересы часто довольно сложно, если вообще возможно -и наконец, при грамотном подходе, самостоятельно сделать робота может оказаться дешевле. Мы будем использовать максимально дешевые, но готовые узлы, потому что сборка с нуля не каждому интересна, более сложна и рискует надоесть затянувшемся на месяцы процессом :). Если робота хочется не просто заполучить на поиграться, а именно сделать самому, тогда поехали! Робот самостоятельно не принимает решений, то есть это управляемое с ПК шасси, которое выполняет команды и передает видеосигнал. Однако, доработать его до самостоятельного робота не составляет никакого труда — нужно лишь добавить сенсоры и дописать логику бортового компьютера. Платформа на это рассчитана. Нам понадобится: Для гусеничного шасси 1. Двухмоторная коробка с редуктором — Tamiya Twin Motor Gearbox (TAM70097) 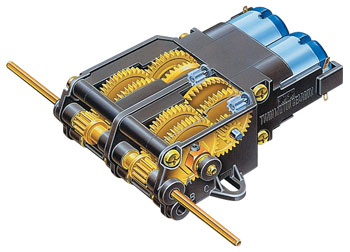 2. Гусеницы и катки с осями — Tamiya Track and Wheel Set (TAM70100) 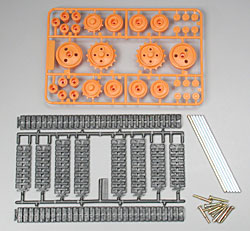 3. Платформы и крепеж — Tamiya Universal Plate Set (2) (TAM70157)  из этого дефицитом в России является только пункт 2. Купить остальное можно в Терраэлектронике (70097 — 520р, 70157 — 385р) Или в официальном магазине Tamiya. Если будете покупать в нем, то берите гусеничное шасси (630р) и коробку (390р). Вам останется про запас коробка с одним мотором. Дело в том, что нам нужна коробока с двумя моторами, чтобы робот мог ехать не только прямо, но и поворачивать, раздельно управляя гусеницами. Поскольку в Москве купить все в одном месте не удалось, а бегать и искать не хотелось, то я все это заказал на ebay у единственного продавца, который по нормальной цене доставляет в Россию. Обошелся комплект примерно в $37.5 с доставкой. Также можно найти эти запчасти на pololu.com. Там подороже и не всегда в наличии. Вместо платформы с отверстиями вполне можно использовать кусок фанеры, а для крепежа металлический конструктор, который продается в детском мире примерно за 200-400 рублей (есть несколько наборов).  В общем, самое главное — это гусеницы и мотор-редукторы. Бортовая электроника 1. Arduino Duemillanove/ Freeduino 2009 — мозг нашего робота —  на ebay от $17.60. Я брал на freeduino.ru, довольно давно и за 950р. Для робота вполне достаточно на базе Atmega168 (дешевле чем Atmega328P), если вы не собираетесь писать очень навороченную логику робота или использовать Arduino как и я для других экспериментов, которым 16кБ флэш памяти может не хватить. 2. Силовой модуль Motor Shield V2 или V3 для управления моторами  На ebay от $10.5, старая версия и без гребенок для установки следующего этажа шилдов. на Freeduino.ru от 600р в виде конструктора до 900 р в собранном виде. Советую v3 — она более гибкая. 3. Sensor shield V4 — удобный модуль для подключения сенсоров и сервоприводов. Если вас не пугает пучок проводов, то он нафиг не нужен. Я купил его для экспериментов, поэтому воткнул для удобства. порядка $8 на ebay 4. SmartBluetooth модуль. Понадобится для связи с ПК или ноутбуком.  на ebay от $9.9. Я брал давно и мне он обошелся аж в $23 5. Bluetooth dongle — если будете управлять с ПК и Bluetooth интерфейса в нем нет, то нужно купить.  цена — $2.7 цена — $2.7Итого $40.7 если обойтись без Sensor shield, но с bluetooth dongle для ПК. Нам также понадобится питание для Arduino и моторов. Вы можете воспользоваться обычными АА батарейками в таком вот отсеке, купив его на рынке или в ЧипИДипе, если очень срочно.  «RPMS & AA» или 9В батарейкой типа «Крона». Я предпочитаю компактные и более удобные LiPoly аккумуляторы:  или 2 LiIon элемента 18650, соединенных последовательно. Этого комплекта достаточно, чтобы сделать робота с базовым функционалом, поэтому я бы предложил в этом месте сделать паузу, выбрать где и что вы будете заказывать, сделать заказы или съездить по магазинам, а пока заказ будут доставлять, заняться видеоподсистемой. При заказе в основном из китая все компоненты вы получите примерно через 2-3 недели и обойдется все в $80-100, в зависимости от выбранного продавца или вашего желания поторговаться и сэкономить, может быть и дешевле. Если покупаете несколько товаров у одного продавца, просите комбинировать доставку, на этом можно сэкономить. Так называемая «бесплатная доставка» (free shipping) просто включена в стоимость и хороша, если покупаете один предмет. Собираем шасси Комплект Tamiya 70100 идет с подробной инструкцией. Аккуратно вырезаем кусачками или канцелярским ножом резиновые гусеницы и катки, отделяя от литников, собираем и крепим с помощью винтиков М3х10 к фанерной площадке или если купили Tamiya universal plate set, то комплектными клинышками, они многоразовые, так что ничего страшного, если сначала что-то не туда воткнете. Затем собираем коробку моторов с редукторами TAM70097. У нее есть 2 варианта передаточных чисел. 58:1 ездит очень и очень шустро, но моторчики на малых оборотах не тянут и жалобно стонут, а после того, как нагрузим платформу, могут вообще еле ворочаться. Рекомендую собирать в варианте 201:1, так наш «танк» не будет убегать из поля зрения и будет двигаться более плавно. Правда шуму от бешено вращающихся шестерней будет побольше. Ведущие шестерни шасси насаживаем на шестигранные оси коробки. Для проверки работоспособности достаточно подать питание от 2 батареек на моторчики просто конснувшись проводками контактов мотора. Теперь нужно подпаять по паре проводков к моторчикам. Сантиметров по 10-15 будет достаточно. Затем с помощью деталей от конструктора я закрепил вторую площадку для крепления электроники. В принципе, можно и в один этаж делать, просто там места маловато и работать не очень удобно, но вполне возможно. На второй этаж винтиками М3х10 крепим Arduino/Freeduino (она не совсем совпадает по отверстиям и становится чуть-чуть по диагонали). Вторым этажом вставляем MotorShield. Через отверстия в площадке пропускаем провода от моторчиков и крепим провода в порт М3 и М4 — крайние винтики, средний остается неиспользованным (он для шаговых двигателей). Полярность подключения моторов значения пока не имеет, ее потом можно поменять или задать программно, так что не бойтесь перепутать. Bluetooth модуль пока просто прикиньте куда воткнуть или прикрепите к верхнему этажу канцелярской резинкой. Я его даже распаковывать не стал — вспененная упаковка послужит ему механической защитой, а заодно и не позволит замкнуть контакты случайно. Получится примерно вот такой бутерброд:  «RC Tank chassis» Откройте полноразмерную картинку, чтобы рассмотреть получше что и как соединено, если возникли трудности со сборкой и подключением. Arduino крепите USB портом к краю платформы, чтобы удобнее потом было подключать кабель и программировать не снимая с робота. Работы всего на пару часов, если делать не торопясь. Видеоподсистема Чтобы покататься с изображением от первого лица нам понадобится миниатюрная видеокамера, радиопередатчик (трансмиттер) и приемник (ресивер). Вариантов огромное множество. В том числе дойти до рынка и купить в магазине шпионских штучек или аппаратуры видеонаблюдения китайскую радиокамеру. Обойдется скорее всего в 2-4 тыр вместе с ресивером. Но гораздо дешевле заказать из Китая. Рекомендую брать на 1.2 ГГц, а не 2.4ГГц, чтобы избежать помех bluetooth модулю и WiFi, работающим на 2.4ГГц Например вот такой комплект:  обойдется чуть больше $30. Есть и дешевле, в зависимости от камеры в комплекте. На ebay можно купить точно такое же или с камерой в металлическом корпусе как на картинке с коробки. Качество изображения у всех этих CMOS камер весьма так себе (380ТВЛ и те довольно мыльные и с низким динамическим диапазоном и высокими шумами при слабом освещении). Поэтому я заказал на hobbyking.com камеру на ПЗС матрице Sony с разрешением 420ТВЛ и чувствительностью получше, что позволяет даже под столом без дополнительной подсветки видеть что проиходит.  А также крепление для нее с поворотом и наклоном:  Как гласит надпись на картинке — сервоприводы в комплект не входят, поэтому заказываем недорогие 9граммовые сервы. Нам понадобится 2 штуки, 3я останется про запас, если сломаем. У меня камера от 9В работать не хочет, поэтому приходится питать ее от отдельного аккумулятора на 11.1В. Приемник и передатчик использовал из недорогого комплекта, показанного выше. (Передатчик пробовал более мощный — на 800мВт, но он прилично греется, громоздкий с радиатором и мощность такая, что вызывает наводки на сервоприводах камеры). Можно подключить ресивер к телевизору, но управлять с компьютера, а смотреть в телевизор не слишком удобно (разве что купить портативный). Поэтому нам понадобится устройство видеозахвата. Благо стоит оно недорого, очень компактное, питается от USB порта, все кабели и софт в комплекте:  Из мелочей полезно иметь выключатель, чтобы не мучаться с выключением, выдергивая коннектор питания и комплект коннекторов male и female Вот собственно и все, что нам понадобится. Вариантов где купить и как сэкономить предостаточно, есть и другие, но статья получится бесконечной, если пытаться перечислить все. Собирать все это довольно увлекательно и совсем не так сложно, как может показаться на первый взгляд. Но окончательной сборкой и настройкой мы займемся в следующей части, а пока нужно купить все необходимое и собрать шасси. :) Удачных покупок! UPD Ко мне не раз обращались по поводу стоимости. Чтобы не было недоразумений, сведу воедино: 1. Шасси — я купил на ebay за $37.5с доставкой. В Москве все компоненты есть в Terraelectronica: 70097 (мотор-редукторная коробка) — 514р 70157 (2 платформы+крепеж) — 381р 70100 (гусеницы и колеса) — 571р Итого шасси в Москве 1466 р (~$46-$50) 2. Электроника — $40.7 если обойтись без Sensor shield, но с bluetooth dongle для ПК. Все из Китая. 3. Видеоподсистема — от $27 на DealExtreme. Итого полный комплект от $105 (все из Китая) до $118 (шасси в Москве). Батарейки отдельно, вариантов питания слишком много, чтобы здесь описывать. UPD 2 Для зарядки литий-ионных и литий-полимерных аккумуляторов нужна соответствующая зарядка — обычный блок питания не подойдет. На хоббикинге есть целый раздел зарядников: www.hobbyking.com/hobbyking/store/__216__408__Battery_Chargers_Acc_-Battery_Chargers.html Сам я пользуюсь таким: HobbyKing ECO6 50W 5A Balancer/Charger w/ accessories. Ему нужен источник питания на 12В ок 5 А, на HK такой есть, можно и у нас купить на радиорынке. Все ссылки даны в статье. Часть 2 Часть 3 |

Комментарии
1.куда подключить блетус модуль просто когда вы установили сенсор шалд макетная плата исчезла на сколько я понял вы подключили блетус к сенсор шилд но куда.
RSS лента комментариев этой записи